Design
|
||
Team 15: "Do It"
|
||
| Team schedule | ||
| Our schedule | ||
| Budget | ||
| Our budget | ||
Design Process |
||
The following text details the process that we underwent to brainstorm, design, select, and manufacture our robot for the 2009 ME 210 final project. |
||
Brainstorming and Ideas |
||
The team met in order to brainstorm and discuss ideas for our design. We laid this process out in an open forum in which we did not reject any ideas, no matter how out of the box or impossible they were. All of our ideas were outlined based on certain criteria that we were looking for. The criterion that we looked at first was how to score points. Each member wrote, told, or drew their idea down on a sheet of paper or on sticky notes. We got suggestions from simply moving back and forth, to more spectacularly launching Nerf balls of fire. At this stage no idea was rejected. During our initial meeting we also laid out brainstorming sessions for shooting mechanisms, driving mechanism, shape, orienting, and aiming. At the end of each brainstorming session we had several ideas for each aspect of the robot. For example: in terms of a shooting mechanism we had ideas of a catapult, a trebuchet, twin roller launched system, ratchet and spring system, turret cannon, machine gun, and all at once barrage. Because of the number of ideas that we had we chose to give code names to the ones we liked the best so that we can better identify it. The extending arms mechanism was code named “The Giver”, because of its appearance of someone opening their arms to give a gift, and the ratchet and spring launching system we code named “Hypersnail 2™”. Afterwards we had a collection of possible ideas to choose from. At this point we needed to narrow down the ideas to a set of five design concepts for the first design review of the project in which we would be presenting our design considerations to the class. |
||
 The Giver The Giver |
||
|
||
Design Selection |
||
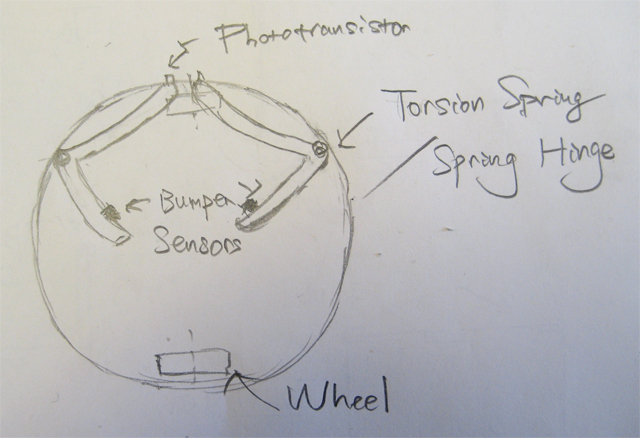
We looked over our brainstorming results and eliminated those ideas which were strictly illegal as per the rules of the competition, such as shooting water at the opponent or launching fireballs. We then eliminated ideas that were going to be too complicated to be completed within the timeframe of the project. One of these ideas was a shooting mechanism with a retractable ball so that one ball can be fire multiple times. Out of the remaining ideas we choose to present the ones that were the most easily implemented. Our team's strength lay in our mechanical knowledge. As such we decided to go with ideas that relied more on mechanical solutions and that involved minimal electronics and coding. We chose to focus on earning points by hitting the bumpers. We felt that this was going to be the fastest and most reliable method of scoring points. Our design had a circular or rounded square shape (at this point it was yet to be decided), arms that extend to hit the bumpers, and would follow the walls instead of the tape because we felt that tape sensing added unnecessary electrical and coding difficulty. Additionally our original design included a shooting mechanism and an eight photo transistor array beacon detector. During this design state we kept a file of top secret ideas that we did not present. If we found that we had enough time we would use these top secret ideas, but if we didn’t have the time or resources we would continue with our original idea. These top secret ideas were the top of our “out of the box” thinking. We would have liked to have these ideas implemented, but we didn’t want to discuss them lest they be used against us. |
||
Strategy and Simplification |
||
Our chosen design focused on getting points by hitting the bumpers. The robot would orientate using the 8 photo transistor array to instantly locate the enemy beacon. Because of the known geometry of the play arena and the known relative position of the two robots, we would have known how many degrees we would have needed to rotate the robot to face forward. After this point we would fire our Nerf balls, extend our arms, and then move back and forth following the walls to hit the bumpers. We decided to discuss our design plans and strategy with our coach, Sal Trujilio, early on. From our meeting it was made clear that we should make it a priority to get a working system as early as possible, and then afterwards add any elements of interest. This would mean that we would focus of getting the robot to score the necessary five points. So our design was simplified. Now the robot would not be using a shooting system, but would only be driving back and forth hitting the bumpers to gain points. Additionally our beacon sensing array would be simplified from eight photo transistors to one photo transistor. The robot would spin around fast and when the one sensor found the beacon, we would know our orientation. By reducing the beacon sensing array, we have simplified the circuitry and the coding necessary to get our orientation. |
||
With the simplifications in place our robot would require the following sub-systems to work: controllable motors, deployable arms, bumper sensors, and light sensor. The construction of the robot would depend on creating these sub-systems and successfully integrating them together. More discussions about our robot’s mechanical design are included here. |
||
Tong Zhang | Agustin Ramirez | Nina Joshi
|
||
last updated 3.12.09 |
||
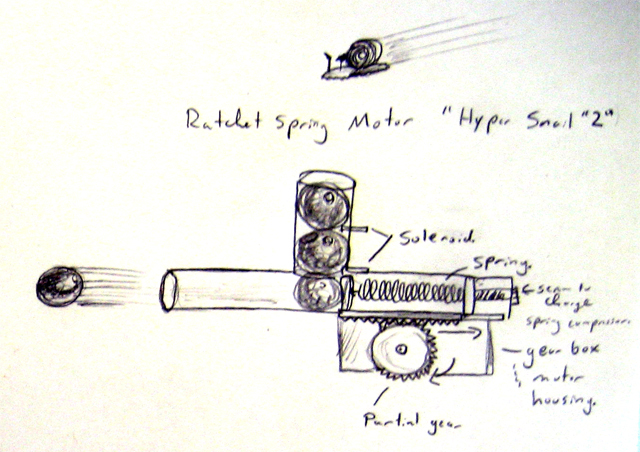 Hypersnail 2™
Hypersnail 2™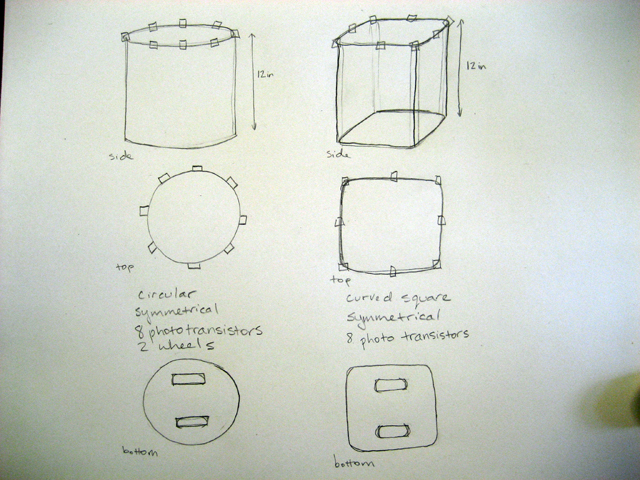{kind=link}